Introduction
Robot Modeling Introduction
This small course is heavily influenced by the book 'Robot Modeling and Control' by Mark W. Song, Seth Hutchinson and M.Vidyasagar.
The book can be found on Amazon.
★ ★ ★ ☆ ☆ $134We will be mostly concerned with fundamentals of robotics, including kinematics, dynamics and motion planning as well as have a solid understanding of how linear Algebra works.
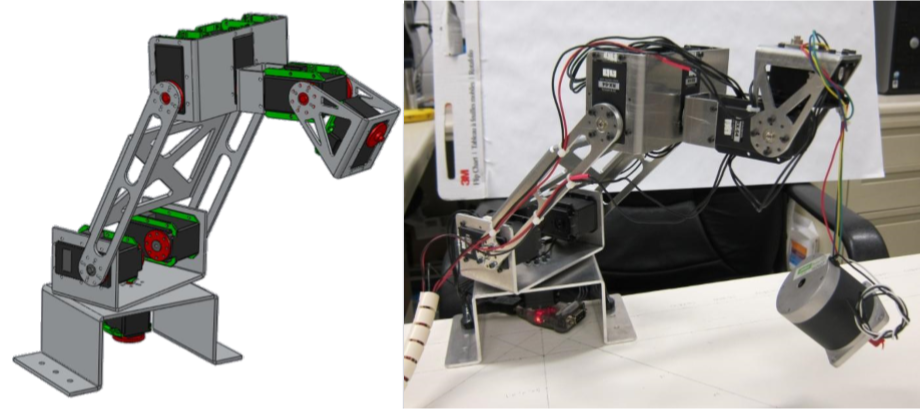
For our case we will involved in understanding how a robot arm works, we call these kinds of arms, manipulators.
This small interactive website's purpose is to show that these calculations are not as troublesome and complexe as they might appear and how knowing a couple basic knowledges and conventions can enable us to create very complex models that can and are used in the real world.
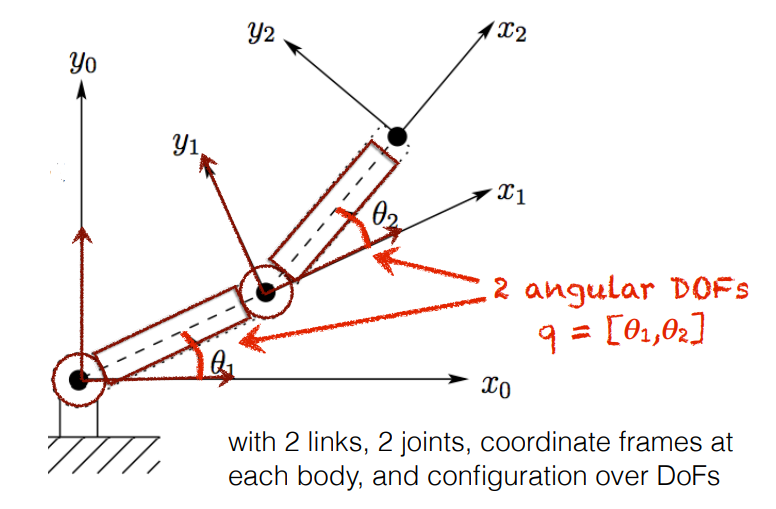
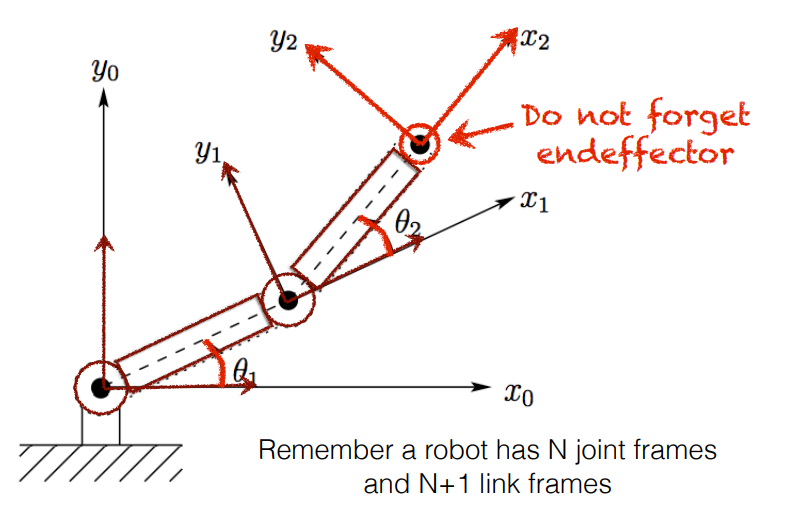
Our primary concern will be the mathematical modeling of the manipulator and understand the complications that accompanies with each degree of freedom added.
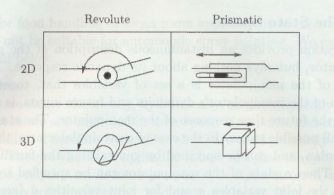
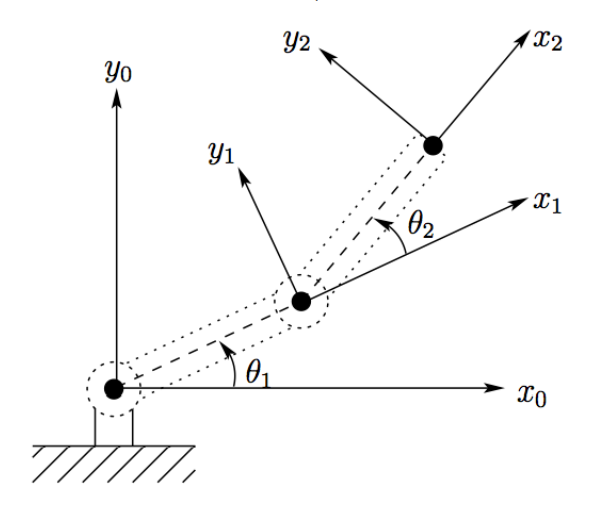
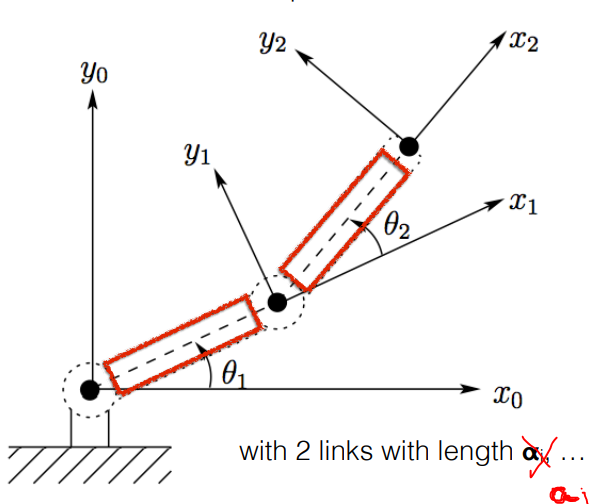
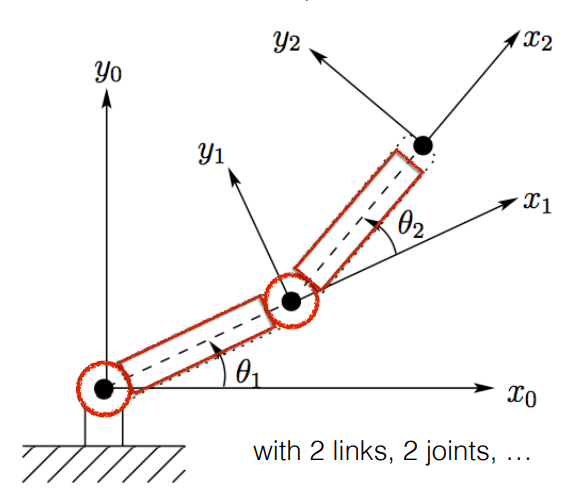
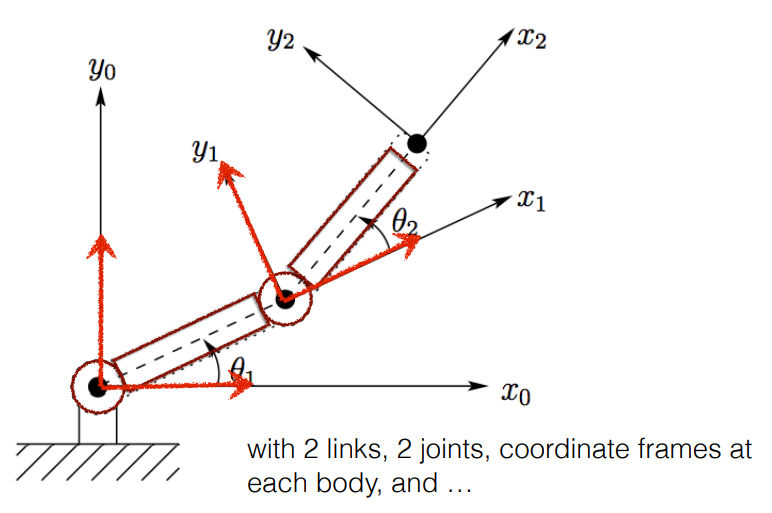
We're mostly going to represent parts of the manipulator with the following drawings.
Revolute joints are there to ONLY rotate, and prismatic joints can ONLY translate.
There are a couple notions to learn before we can begin, just so the explanations that come later on makes more sense.
DOF stands for degrees of freedom.