Translation Matrix
Translation Matrices
Nothing really easier than a translation matrix.
All you really have to do is keep track of which axis you would like to translate.
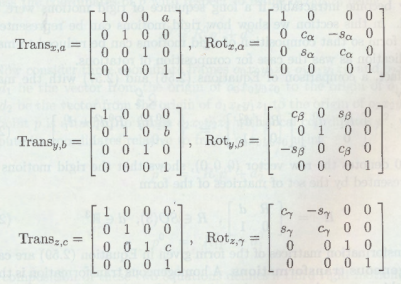
For our case, it is important to have only one axis translation at the time. Meaning that if we translate x by 2 units, then dx = 2 and dy = dz = 0. This is important because we need to keep a good track of which rotations and translations we do as we need to gradualy move towards the next link. Messing with the order will definitely give you the wrong answers and thus make your manipulator potentially move to obstacles or even worse force itself in positions impossible.
Let's go through all the elementary rotations and translations seen so far one more time as it is most crucial to have a clear understanding of these matrices.