Inverse Kinematics
Inverse Kinematics
Inverse kinematics is nothing more than geometry between the links and the joints. For this reason we need to remember some of the properties that facilitated our lives when dealing with complex geometry problems such as the law of cosines.
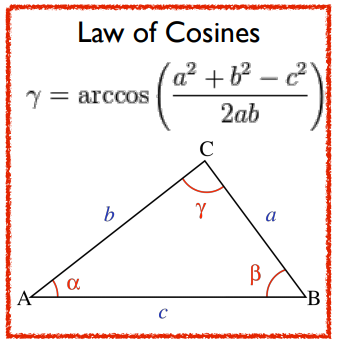
Which can be used to cases such as this when it comes to our manipulators.
Let's start...
We need to make sure to go step by step again like before when doing inverse kinematics, it is impossible to do otherwise anyways. We need to know each angle (after we decide on the conventions as talked previously) in order to determine the whole setup.
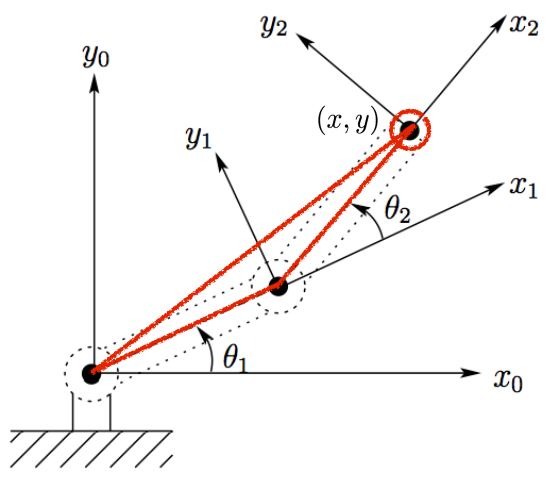
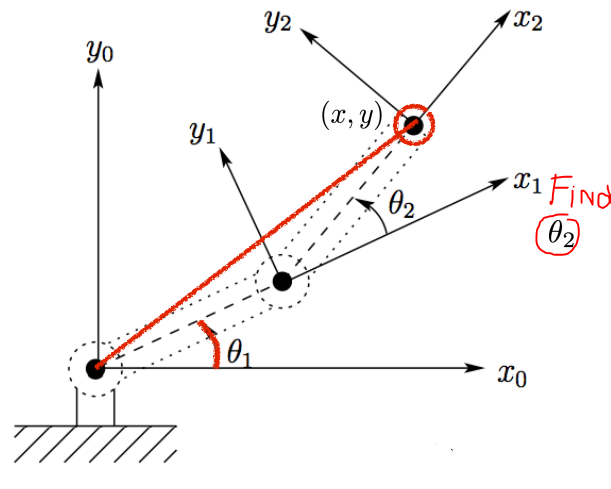
Let's start with Θ2
I really wish I could explain this thoroughly but I've come to realize that geometry is more of a perspective that you gain over the time as you do more and more of them, so in case this step is a little complex, I would really advise you to just to a couple geometry problems to remind yourself.
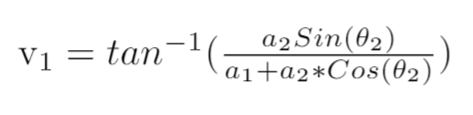
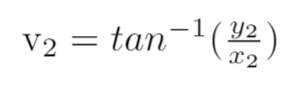
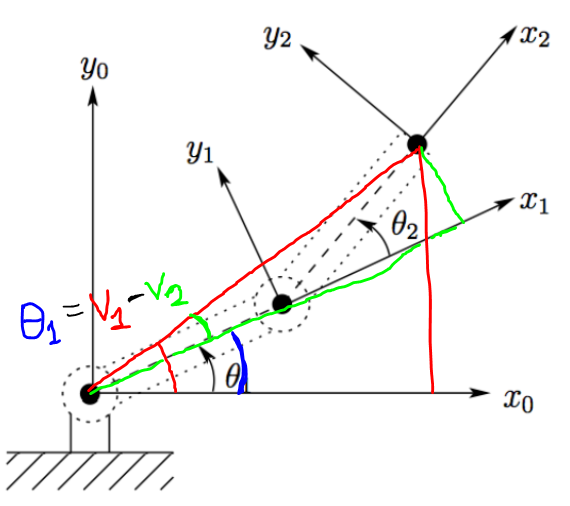
Next step, we need to find θ1, for this we need to think about two triangles
The first triangle is the one that takes in the origin of the manipulator and the end-effector's coordinates x2 and y2.
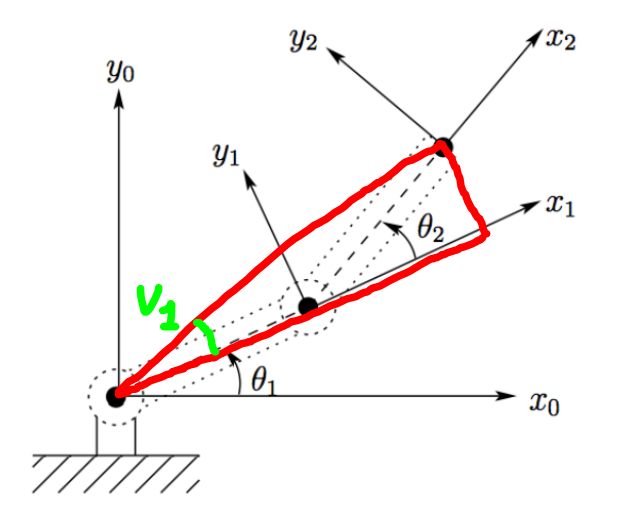
The second triangle is the one that has the origin of the manipulator yet again, but then follows the path of the first link and connects to the end-effector as shown below.
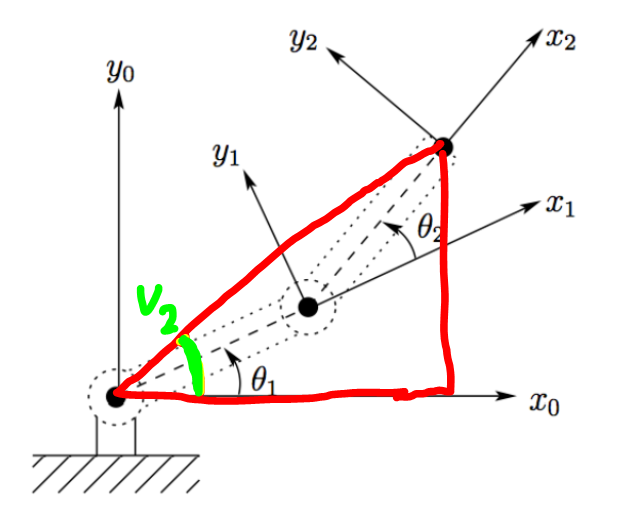
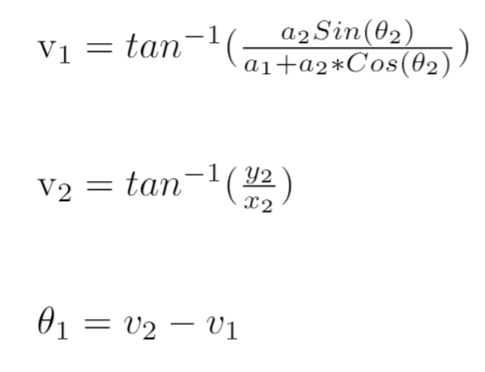
Now we can see that if we were to differentiate the angles that we get from the two triangles, we can find the value of θ1.
This stuff gets a bit more messy as we add more degrees of freedom, but the main steps are the same and can be done eventho tedious. When this is the case, we tend to go thru matrices again for better visual and mental stability.
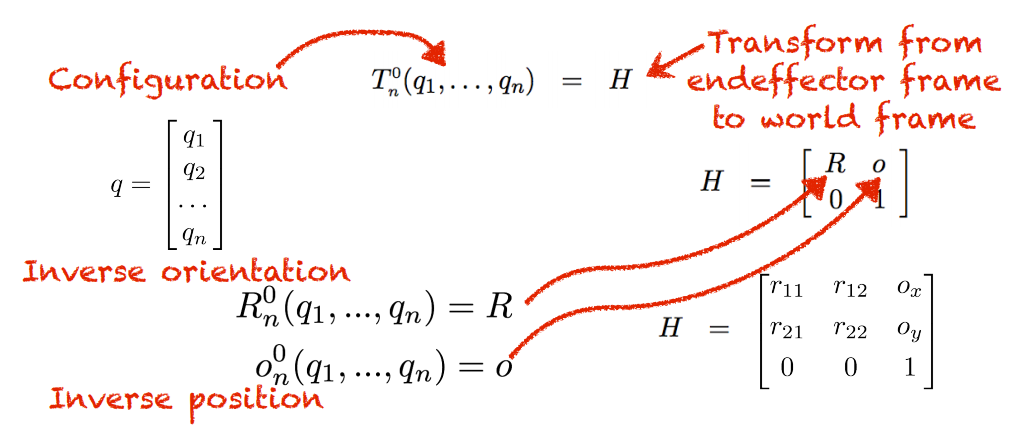
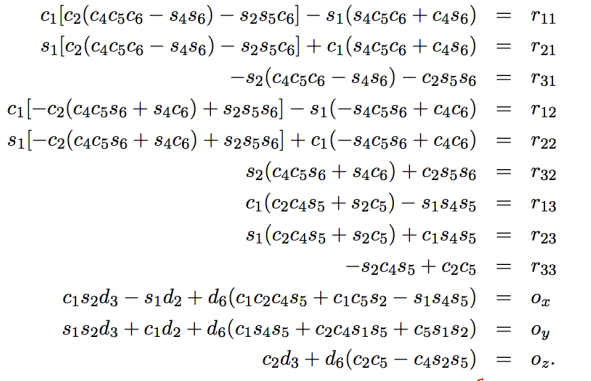
If we were to follow a 6 Degrees of freedom manipulator like the one showed below, we would end up having the following structure for the transformation matrix from the end-effector.
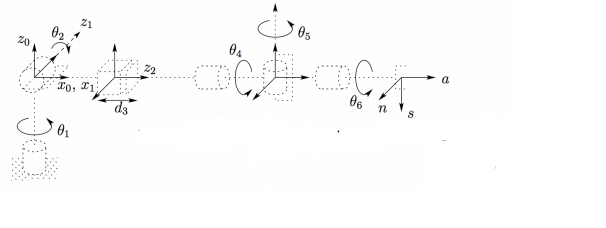
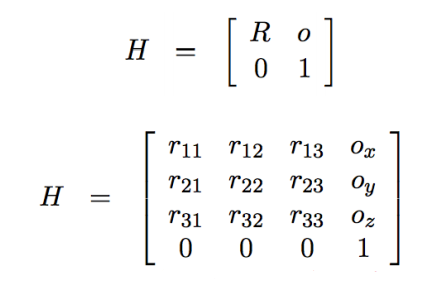
We get values such as